2021年度より専門演習(ゼミ)の担当から外れました。
2021年度の卒業生を送り出したため、伊藤ゼミは終了いたしました。
長い間、伊藤ゼミに関わって下さった全ての皆様、とりわけ過去の全ての卒業生の方々に感謝を申し上げます。
このサイトの更新もこの記事をもって終了する予定です。
何かのご縁がありましたら、その時はまたよろしくお願いいたします。
ありがとうございました。
2021年度より専門演習(ゼミ)の担当から外れました。
2021年度の卒業生を送り出したため、伊藤ゼミは終了いたしました。
長い間、伊藤ゼミに関わって下さった全ての皆様、とりわけ過去の全ての卒業生の方々に感謝を申し上げます。
このサイトの更新もこの記事をもって終了する予定です。
何かのご縁がありましたら、その時はまたよろしくお願いいたします。
ありがとうございました。
10/20(土)に行われたスクラッチのカンファレンス(Scratch 2018 Tokyo)にて口頭発表を行いました。
当日は多くの方に聞いていただき、また、多くの質問をいただきありがとうございました。
引き続き三世代生涯学習大学およびスクラッチデー山梨の実施・運営を行って参りたいと思いますので、よろしくお願いいたします。
当日発表資料:カンファレンス発表資料01.pdf
昨日のScratch Day 2018 in Tokyo では、多くの方にブースに来ていただき、ありがとうございました。
展示内容に関する説明資料については追って公開いたしますので、少しお待ちください。
また来年皆様とお会いできることを楽しみにしております。
pibuggy は、ラズベリーパイを用いたステアリング型のロボットです。
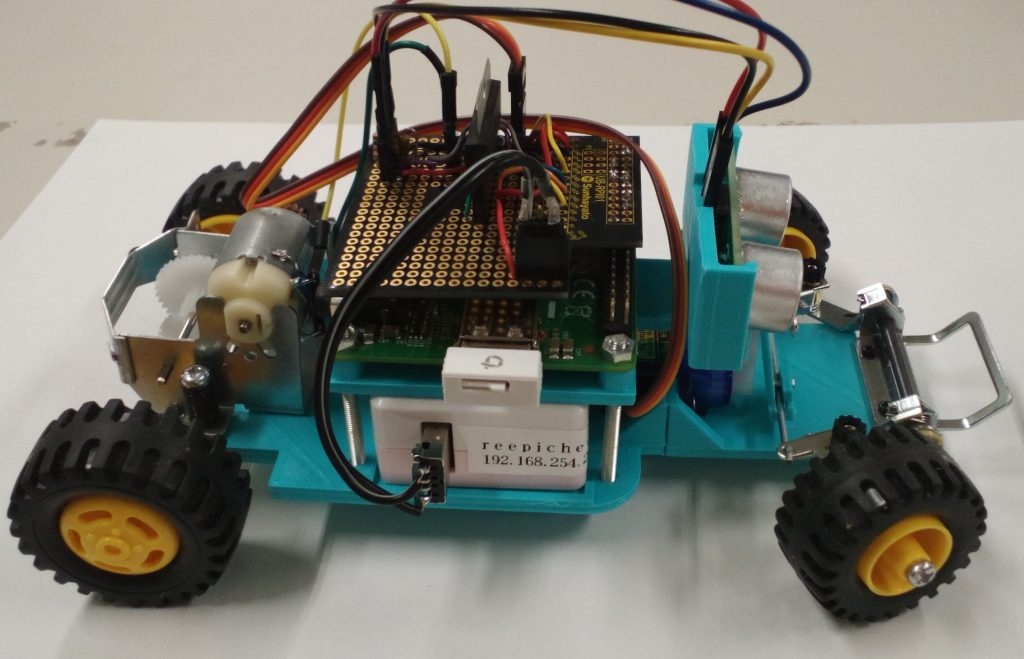
駆動系にはタミヤのバギー工作基本セットを用い、モータにはています。また、ステアリングにはマイクロサーボSG-90を用いています。ボディにはラズベリーパイA+と追加基板を載せています。電源は小型のモバイルバッテリで、モータおよびラズベリーパイに電力を供給しています。
ボディは3Dプリンタを用いて造形しており、ネジ止めなど簡単な作業でロボットを組み立てることができます。モータドライバはユニバーサル基板上に製作していますが、プリント基板化してより安易に製作することを目指しています。
センサ部はpiroverと互換性があり、カメラモジュールを付けることもできます。
RSPBuggyにより、MESHネットワークを有効にしたScratch 1.4でPC等からpibuggyを簡単に制御することができます。
現在ステアリング系の改修中で、よりハンドリングしやすい構造を検討中です。
pirover は、ラズベリーパイを用いた対向二輪型のロボットです。
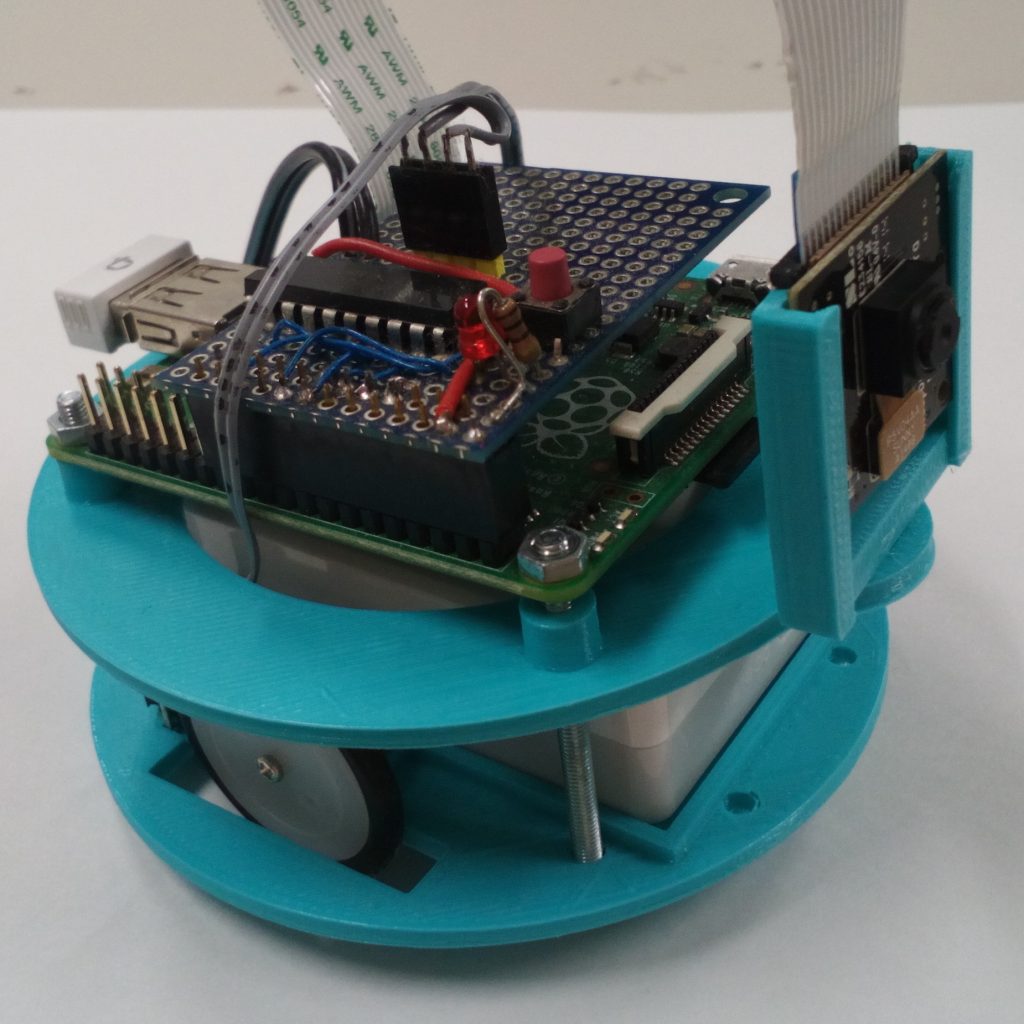
下部にはモーターとして「ちっちゃいものくらぶ」の「ちびギアモータ+プーリー・タイヤ」を用いています。また、上部にはラズベリーパイA+と追加基板を載せています。電源は小型のモバイルバッテリで、モータおよびラズベリーパイに電力を供給しています。
ボディは3Dプリンタを用いて造形しており、ネジ止めなど簡単な作業でロボットを組み立てることができます。モータドライバはユニバーサル基板上に製作していますが、プリント基板化してより安易に製作することを目指しています。
RSPRoverにより、MESHネットワークを有効にしたScratch 1.4でPC等からpiroverを簡単に制御することができます。
1時間から2時間程度、連続稼働させることができます。
2009年から続くScratch Day、伊藤研究室では2010年から参加しています。
今年は Scratch Day in Yamanashi のサポートに続いて、Scratch Day in Tokyoでは学生さんに手伝ってもらって、展示ブースでの活動を行いました。
Retro & Cheap をモットーに、親に連れてこられた小さなお友達を楽しませるような展示発表を目指しています。昨年はAIBO(retro)と小さなロボット(cheap)を使って、ミニサッカーゲーム(要はロボットを操縦してボールをゴールに入れる)を行ったのですが、小さなお友達にかなり公表だったので、今年はロボットを使った迷路抜けをやってみました。
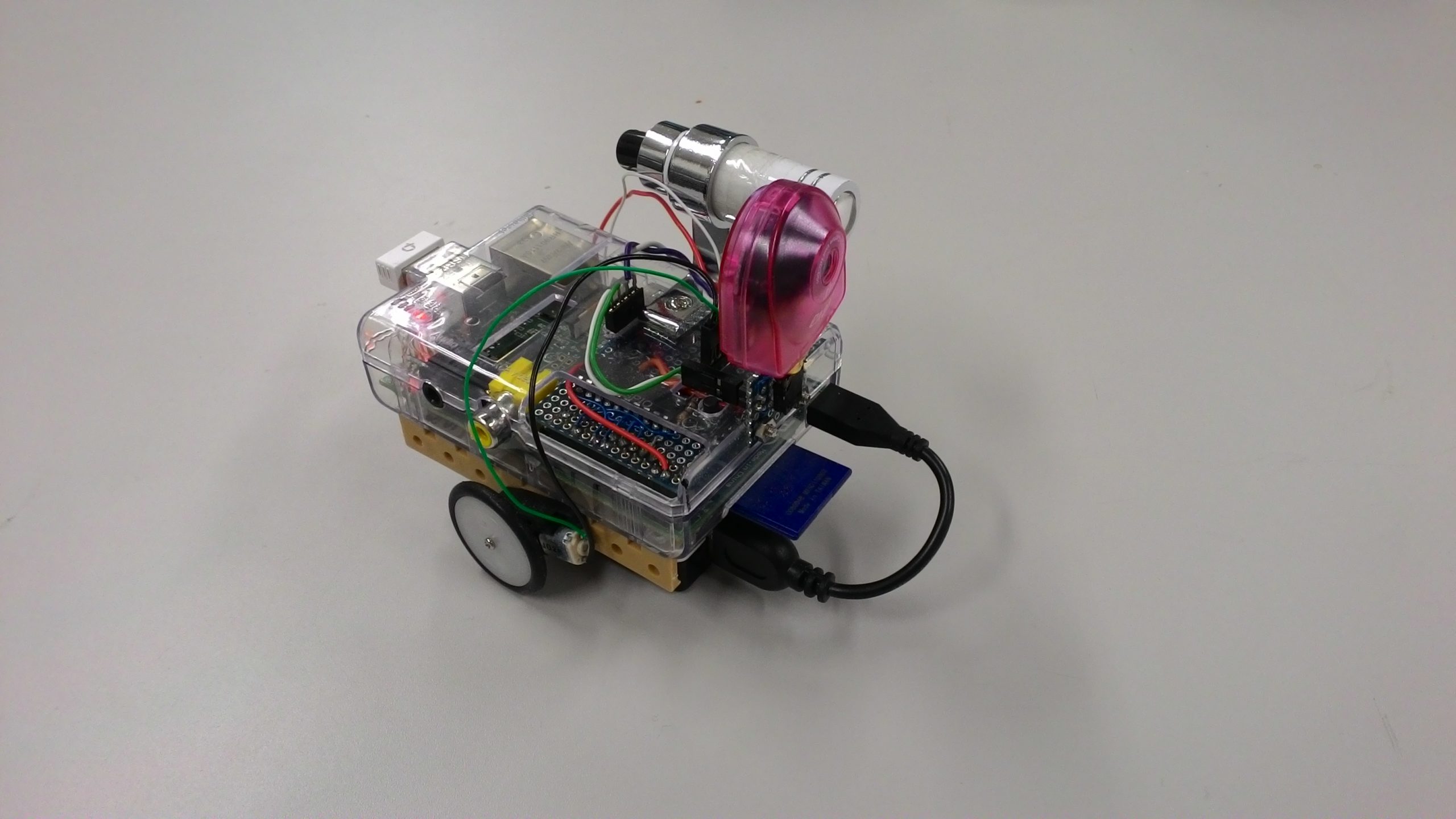
使ったロボットは下のようなものです。

今回のロボットはRaspberry piに、「ちっちゃいものくらぶ」の「ちびギアモータ+プーリー・タイヤセット」を付けた簡単なロボットベースに、TrevaとLEDライトを付けた簡単なものです。
TrevaはFeel H用のPHSのイヤホンジャックに差し込むタイプのカメラで、今時では考えられない10万画素の解像度となっています。(今回はTrevaがRetroで、ロボット全体とコースがCheapになります)
15年近く前にいしかわさんがデジQにTrevaを載せており、その頃にジャックを分けて頂いてて、ずっと放置状態だったのですが、Raspberry piに付けるカメラを物色していたところ、解像度はとても低いですが、GPIOだけで接続できるのと消費電力が小さいということで採用しました。ちなみに、会場にはいしかわさんもお見えになったのでTrevaジャックのお礼をしました。
イベントでは、このロボットをScratchで作ったプログラムで操縦して、下のような迷路を抜けさせるミッションを行いました。この迷路はゼミ唯一の女子学生が夜なべをして作ってくれたものです。中の装飾は来場した子ども達と一緒に完成させました。

実際に迷路を抜ける様子のビデオは下の通りです。
ロボットを直接見ながら操縦するのは簡単ですが、Trevaの画像を通してだとかなり難易度が高いです。
Treva の画像取得のスピードが遅いので、のんびりした画像更新になっています。また、子ども達のクリック連打に対応するよう、あまり素早くは動けないようになっています。
使用したロボットは以前から作っていましたが、フィールドやプログラムは5日間くらいで作りあげたもので、それにしては多くの人に楽しんでもらえたと思います。せっかくなのでもう少し改良して、学園祭の展示に使おうと思っています。
また来年も何か考えて出展したいと思います。
ご来場いただいた皆様、ありがとうございました。
研究室の紹介ページの更新をずっと怠っていたため、内容が随分と古いものになってしまった。
新しい内容に差し替えるにあたって、古い情報も残しておくことにする。
ちなみに2007年1月3日が最終更新日だった。
“昔の研究室紹介ページ” の続きを読む
5/9に東大福武ホールで行われたScratch Day 2015 in Tokyoに参加してきました。
ブースに来て下さった皆様、ありがとうございました。
会場で展示していた資料をGoogle Driveで公開しました。
https://drive.google.com/file/d/0B6mV1yPXBSvtdzBUNGlrQXdtRk0/view
5/19にベネッセ東京本部で開催されたScratch Day 2013 in Tokyoに参加してきました。
その際に配布したPharoの資料の内容を公開します。Pharoを試してみたいという方の参考になればと思います。
以下のサイトからOS別に入手します。最新版は2.0です。
http://www.pharo-project.org/
日本のPharoユーザー有志がPharo by Exampleの日本語翻訳を行いました。
内容は若干古くなっていますが、基本的なことを学べます。
http://www.smalltalk-users.jp/Home/docs
ドットインストールのSmalltalk入門ではPharoを用いています。
こちらも独学で学ぶのに良いでしょう。
http://dotinstall.com/lessons/basic_smalltalk
Squeak-jaメーリングリストですが、Pharoに関する質問もできます。
http://www.smalltalk.jp/mailman/listinfo/squeak-ja
2012年度の専門ゼミナールIでは、Pharoによるプログラミング入門を行っています。
今年は横スクロールシューティングゲームに挑戦し、学園祭にて展示発表しました。
2日間の展示に使用したソースの準備ができたので公開いたします。
展示ではKinectを使って自機をコントロールしましたが、Kinectがなくてもゲームが試せるようにKinect無し版も公開します。
大森慎司が作成したゲームです。上下左右の矢印キーで自機を操作し、zキーでビームを、xキーでボムを発射します。

網野理恵が作成したゲームです。zキーでビームを発射します。

Kinectとの接続には、KinectOSCパッケージを利用しています。
KinectOSCパッケージの導入や接続については、以下のページを参考にしてください。
KinectOSCの導入 / Раздан-3の備忘録
ダウンロードした圧縮ファイルの中身をPharoのイメージがあるフォルダに展開し、.stファイルを起動したPharoにドラッグ&ドロップしてInstallするか、ToolsメニューのFile Browserで.stファイルを選び、Installボタンを押してください。
なお、起動時に読み込むため画像ファイルはPharoのイメージがあるフォルダに格納しておいてください。
Workspaceを開き、SkyRush new openInWorldを入力して選択し、Do itしてください。
なお、起動した画面をクリックしないとキーボードで操作できないので注意してください。
ソースプログラムや画像ファイルについては、MIT Licenseに従います。
公開しているソースはWindowsでの利用を前提としており、キーコードの違いからMac OS Xでは動作しません。
Mac OS X上のPharoで利用する際には、以下のパッチを導入してください。
パッチの導入には、.stファイルと同様にFile Browserで.csファイルを選択し、FileInしてください。
SkyRush-Mac-keyboardpatch.cs