pirover は、ラズベリーパイを用いた対向二輪型のロボットです。
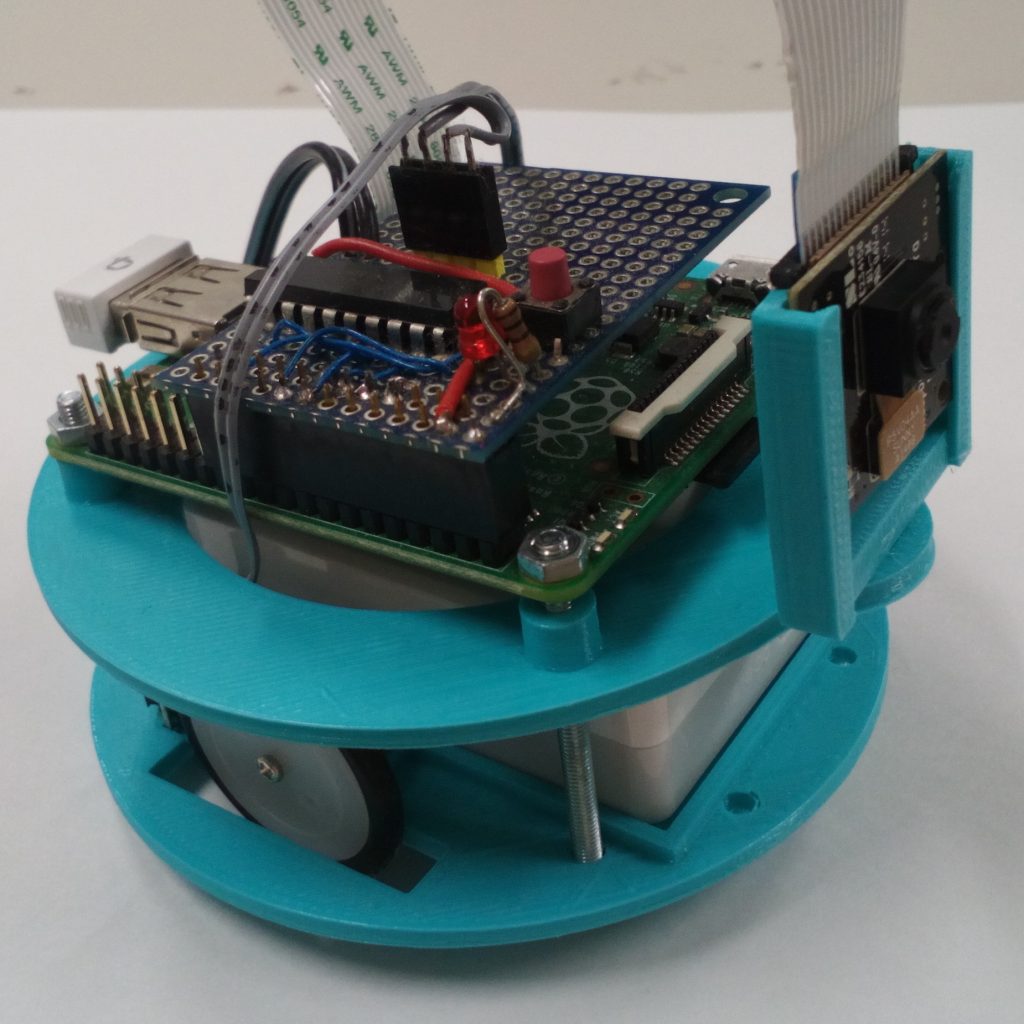
下部にはモーターとして「ちっちゃいものくらぶ」の「ちびギアモータ+プーリー・タイヤ」を用いています。また、上部にはラズベリーパイA+と追加基板を載せています。電源は小型のモバイルバッテリで、モータおよびラズベリーパイに電力を供給しています。
ボディは3Dプリンタを用いて造形しており、ネジ止めなど簡単な作業でロボットを組み立てることができます。モータドライバはユニバーサル基板上に製作していますが、プリント基板化してより安易に製作することを目指しています。
ハードウェア構成
- タイプ:対向二輪型
- モータ:ちびギアモータ
- コンピュータ:ラズベリーパイA+
- ネットワーク:PLANEX 無線LAN GW-USNANO2A
- カメラ:ラズベリーパイ用カメラモジュール
- モータドライバ:74AC541
- 電源:パナソニックモバイルバッテリー QE-QL105-P
- サイズ:95mm x 90mm x 70mm(前後x左右x高さ)
- 重量:
- 消費電力:1W(待機時), 2W(移動時)
ソフトウェア構成
- OS:Raspbian Jessie with PIXEL
- カーネル:Linux Kernel 4.4
- ファイルシステム:aufs+fsprotectによるROM化
- IO制御:WiringPi2 for Python
- 外部インターフェイス:RSPRover
RSPRoverにより、MESHネットワークを有効にしたScratch 1.4でPC等からpiroverを簡単に制御することができます。
1時間から2時間程度、連続稼働させることができます。