pibuggy は、ラズベリーパイを用いたステアリング型のロボットです。
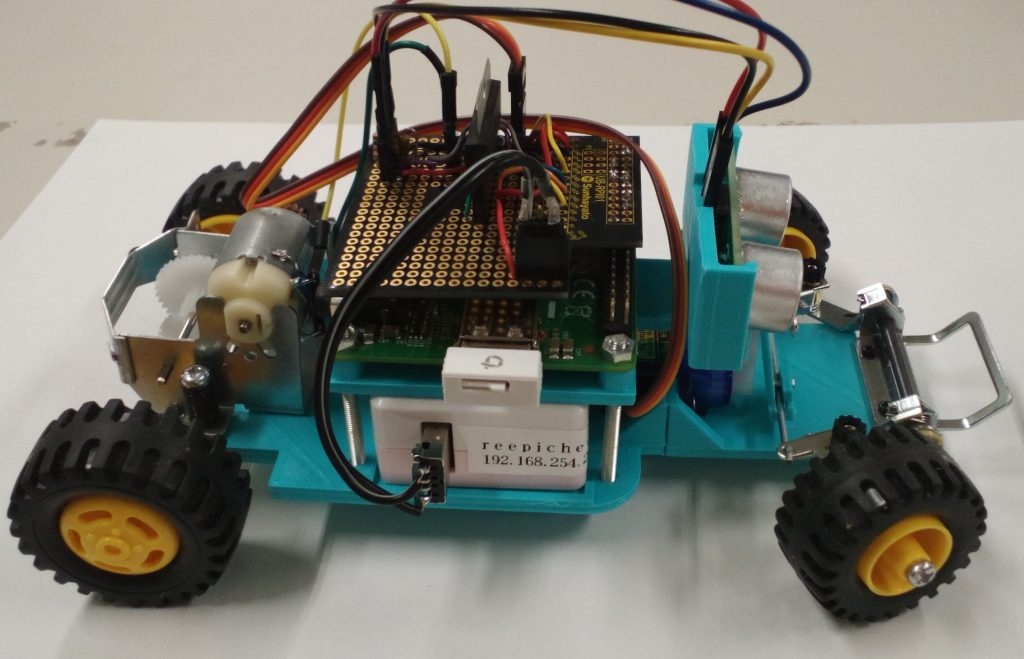
駆動系にはタミヤのバギー工作基本セットを用い、モータにはています。また、ステアリングにはマイクロサーボSG-90を用いています。ボディにはラズベリーパイA+と追加基板を載せています。電源は小型のモバイルバッテリで、モータおよびラズベリーパイに電力を供給しています。
ボディは3Dプリンタを用いて造形しており、ネジ止めなど簡単な作業でロボットを組み立てることができます。モータドライバはユニバーサル基板上に製作していますが、プリント基板化してより安易に製作することを目指しています。
センサ部はpiroverと互換性があり、カメラモジュールを付けることもできます。
ハードウェア構成
- タイプ:ステアリング型
- 駆動系:タミヤ バギー工作基本セット
- 駆動系モータ:なのぼ~どAG用ギアモーター
- ステアリング系モータ:マイクロサーボ9g SG-90
- コンピュータ:ラズベリーパイA+
- ネットワーク:PLANEX 無線LAN GW-USNANO2A
- センサ:超音波距離センサー HC-SR04
- モータドライバ:TA7291P
- 電源:パナソニックモバイルバッテリー QE-QL105-P
- サイズ:190mm x 100mm x 85mm (前後x左右x高さ)
- 重量:
- 消費電力:0.5W(待機時)、1W(移動時)
ソフトウェア構成
- OS:Raspbian Jessie with PIXEL
- カーネル:Linux Kernel 4.4
- ファイルシステム:aufs+fsprotectによるROM化
- IO制御:WiringPi2 for Python
- 外部インターフェイス:RSPBuggy
RSPBuggyにより、MESHネットワークを有効にしたScratch 1.4でPC等からpibuggyを簡単に制御することができます。
現在ステアリング系の改修中で、よりハンドリングしやすい構造を検討中です。