2009年から続くScratch Day、伊藤研究室では2010年から参加しています。
今年は Scratch Day in Yamanashi のサポートに続いて、Scratch Day in Tokyoでは学生さんに手伝ってもらって、展示ブースでの活動を行いました。
Retro & Cheap をモットーに、親に連れてこられた小さなお友達を楽しませるような展示発表を目指しています。昨年はAIBO(retro)と小さなロボット(cheap)を使って、ミニサッカーゲーム(要はロボットを操縦してボールをゴールに入れる)を行ったのですが、小さなお友達にかなり公表だったので、今年はロボットを使った迷路抜けをやってみました。
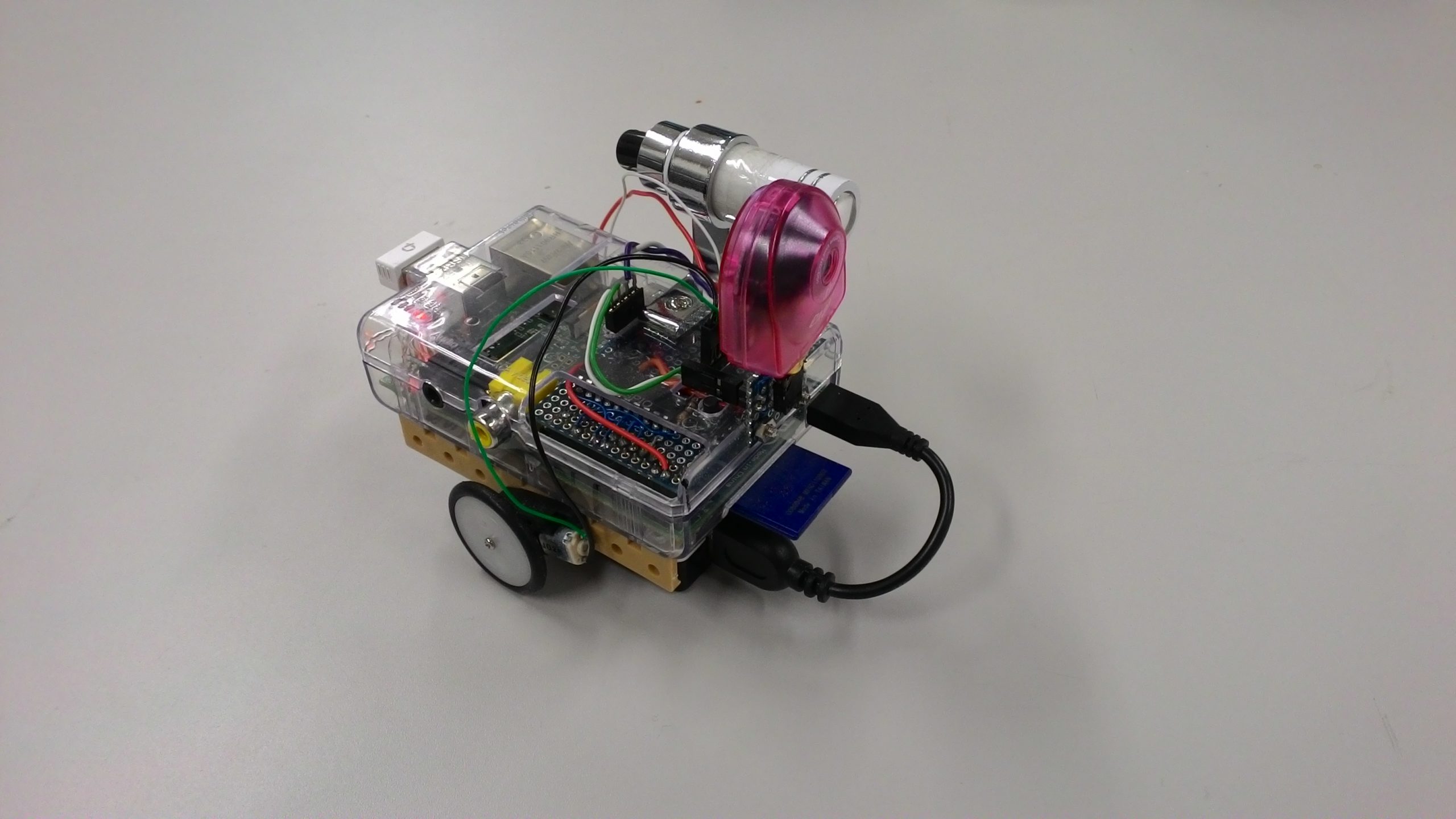
使ったロボットは下のようなものです。

今回のロボットはRaspberry piに、「ちっちゃいものくらぶ」の「ちびギアモータ+プーリー・タイヤセット」を付けた簡単なロボットベースに、TrevaとLEDライトを付けた簡単なものです。
TrevaはFeel H用のPHSのイヤホンジャックに差し込むタイプのカメラで、今時では考えられない10万画素の解像度となっています。(今回はTrevaがRetroで、ロボット全体とコースがCheapになります)
15年近く前にいしかわさんがデジQにTrevaを載せており、その頃にジャックを分けて頂いてて、ずっと放置状態だったのですが、Raspberry piに付けるカメラを物色していたところ、解像度はとても低いですが、GPIOだけで接続できるのと消費電力が小さいということで採用しました。ちなみに、会場にはいしかわさんもお見えになったのでTrevaジャックのお礼をしました。
イベントでは、このロボットをScratchで作ったプログラムで操縦して、下のような迷路を抜けさせるミッションを行いました。この迷路はゼミ唯一の女子学生が夜なべをして作ってくれたものです。中の装飾は来場した子ども達と一緒に完成させました。

実際に迷路を抜ける様子のビデオは下の通りです。
ロボットを直接見ながら操縦するのは簡単ですが、Trevaの画像を通してだとかなり難易度が高いです。
Treva の画像取得のスピードが遅いので、のんびりした画像更新になっています。また、子ども達のクリック連打に対応するよう、あまり素早くは動けないようになっています。
使用したロボットは以前から作っていましたが、フィールドやプログラムは5日間くらいで作りあげたもので、それにしては多くの人に楽しんでもらえたと思います。せっかくなのでもう少し改良して、学園祭の展示に使おうと思っています。
また来年も何か考えて出展したいと思います。
ご来場いただいた皆様、ありがとうございました。
Scratch Day in Tokyo 2016で展示発表を行いました