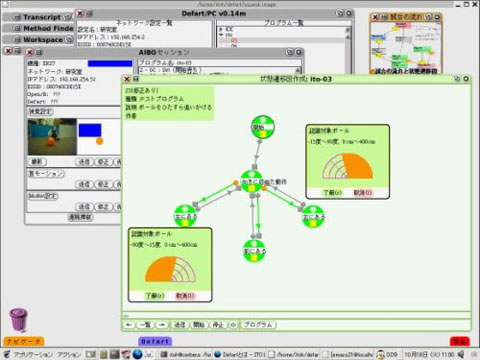
Defartとは、AIBOを自律的に動作させるプログラムを開発するための統合ソフトウェア開発環境です。
Defartは、RoboCupサッカー4足リーグに参加するためにITOLAB.が構築した開発環境です。C++プログラミングの経験がなくても試合に必要なプログラムを作ることができ、プログラミングにおける基礎的な概念の理解を促進できるようなシステムを目指しています。
Defartは、ITOLAB.の研究テーマの一つである「わかりやすいプログラミング」のための実験システムでもあります。プログラミングをわかりやすくするため、Defartではプログラムを図によって表現しています。
自律型ロボットは、さまざまな状況における適切な行動を、自分自身の判断で決めなければなりません。判断するためには、状況に対応した行動を規則として定める必要があります。この規則がロボットのプログラムであり、このプログラムを作ることが自律型ロボットのプログラミングといえます。
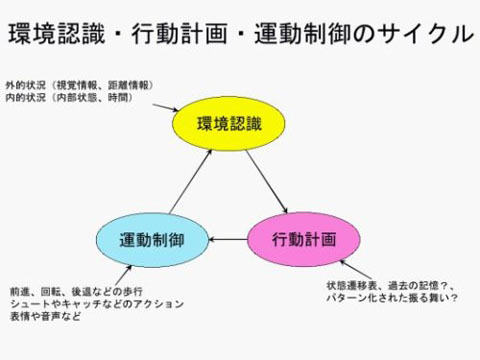
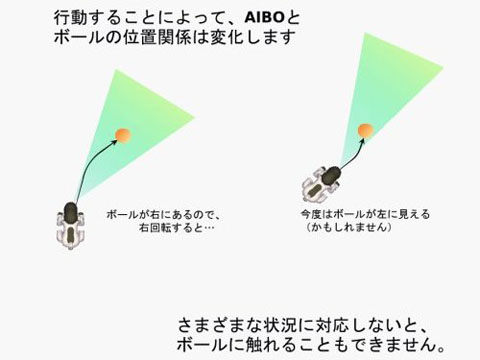
さまざまな状況に対応できる自律型ロボットのプログラムはとても複雑です。例えばロボットとボールしかない状況でさえ、ロボットの前にボールがあるのか、左にあるのか、近いのか遠いのかといったさまざまな場面(入力)と、それに対する行動(出力)が考えられ、それぞれに適切な規則(プログラム)が必要になります。
特にサッカーの試合を行うプログラムを作成するには、ボールを探す、ボールを敵陣地まで運ぶ、シュートするなど、いろいろな機能も必要となります。これらの規則は膨大な数にのぼり内容も複雑になります。
規則をできるだけ抑えるために状態という概念を用います。多くの状況を状態によって絞りこむことで、プログラムをコンパクトに表すことができます。自律的に動く多くのロボットがこのようなしくみをプログラムとして持っています。
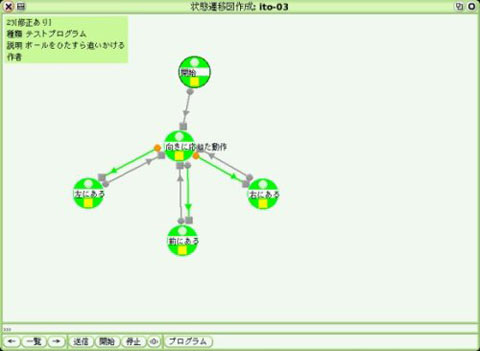
Defartでは、状況と行動の対応を状態遷移図という図で表現します。状態遷移図は状態を表す丸印と、状態をつなぐ矢印で構成される単純な図です。一つの矢印は「条件(入力)が満たされたら対応する行動(出力)をとり、矢印の先の状態に移る」ことを表します。
Defartで作成した状態遷移図は、プログラムとしてAIBOで動作させることができます。こんな単純な表現でも、驚くほどさまざまな動作を行うことができ、人によっては「知的である」という印象さえ持つかもしれません。プログラムによってロボットがどのように動くのか、ITOLAB.の研究発表会やイベントなどでよく御覧ください。
動作環境
オペレーティングシステム
Windows 2000,XP (動作確認済)
Linux (Debian/GNU Linuxで動作確認済)
CPU,メモリ
Celeron 1.2GHz以上、512MB以上を推奨
ハードディスク
300MB以上の空き領域が必要
ダウンロード
カテゴリのDefart/AIBO, Defart/PCをクリックすれば、それぞれのシステムをダウンロードするページが表示されます。
ソフトウェア環境
なお、Defartの動作にあたっては以下のソフトウェア環境が別途必要になりますので、あらかじめインストールしておいてください。
OPEN-R SDK 1.1.5 r3: AIBO SDE ホームページ
Squeak nihongo7: Squeak nihongo7 開発者版ダウンロードページ